
标定系列_20点标定
2022-05-23
12 点/15 点/20 点标定公用一个标定界面,标定所有 20 个点即为使用 20 点标定法。
该标定方式有修正零点的功能,不建议采用带有弧度的焊枪进行标定
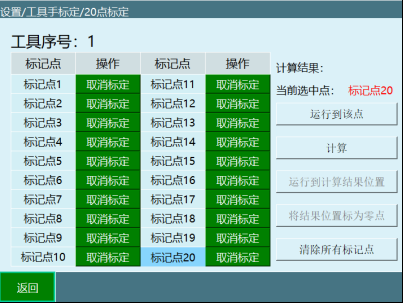
点击“工具手标定”界面底部的【二十点标定】按钮,进入“二十点标定”界面,如图。
预览
具体标定步骤如下:
- 找到一个参考点(笔尖为参考点),并确保此参考点固定。
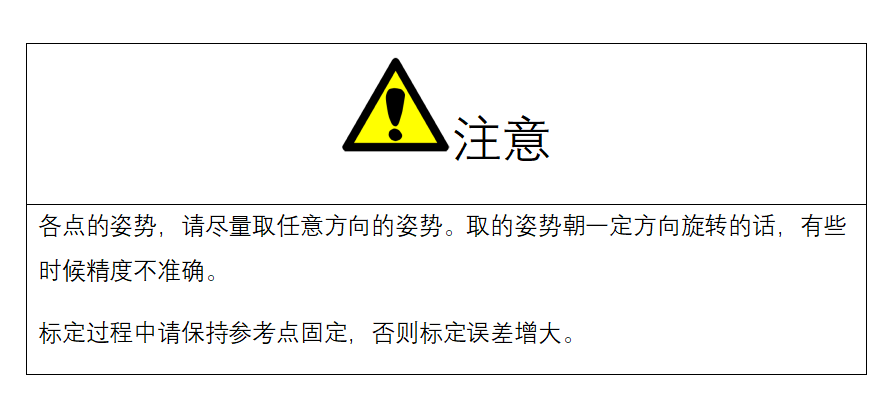
- 开始插入位置点,每插入一点,点击【标记该点】,插入 20 个点,每个点的姿态差异越大越好。
厂家建议:标定步骤,第一点工具手姿态垂直向下,第二点走 A+轴,第三点走 A+,第四点走 A+,第五点走 A-,第六点走 A-,第七点走 A-,第八点走 B+,第九点走 B+,第十点走 B+,第十一点走 B-,第十二点走 B-,第十三点走 B-,其余点主要动 C 轴成米字形排布标定
具体步骤如下。
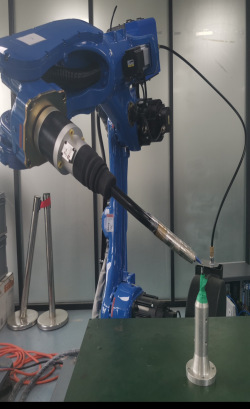
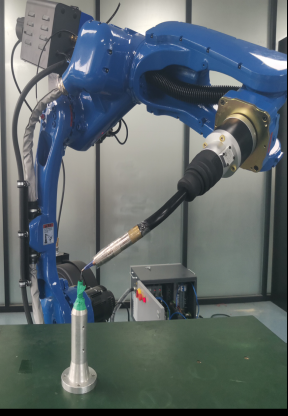
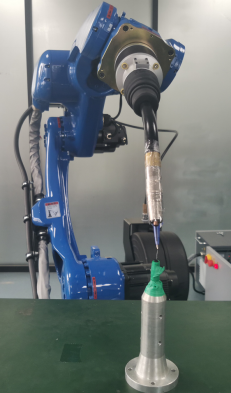
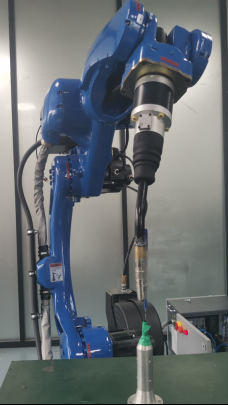
点 1
机器人工具手末端垂直参考点

预览
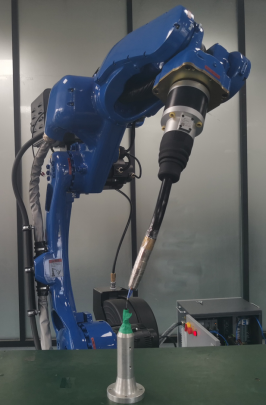
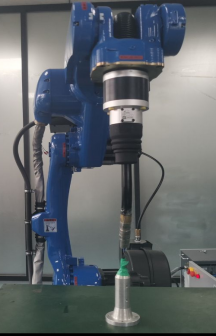
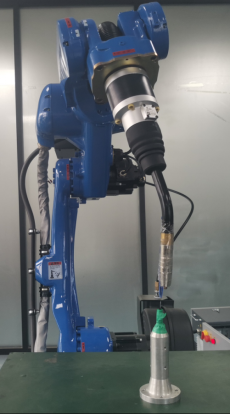
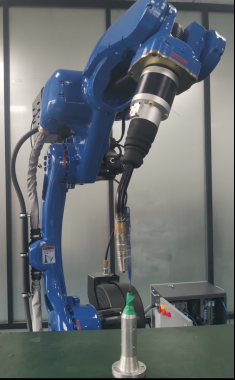
点 2
在第一点的基础上动 A+

预览
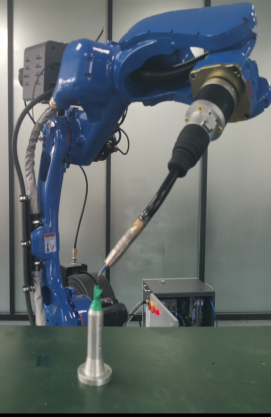
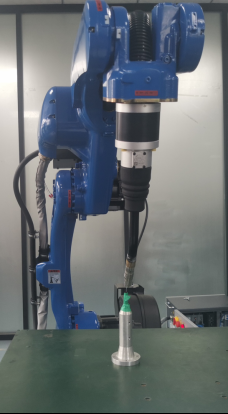
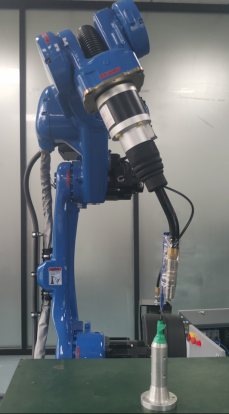
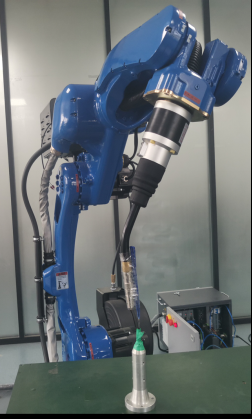
点 3
在第一点的基础上动 A+ 40 度

预览
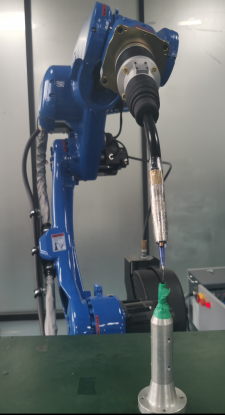
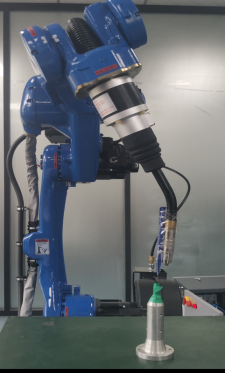
点 4
在第一点的基础上动 A+ 60 度
预览
点 5
在第一点基础上动 A- 20 度
预览
点 6
在第一点基础上动 A- 40 度
预览
点 7
在第一点基础上动 A- 60 度
预览
点 8
在第一点基础上动 B+ 20 度

预览
点 9
在第一点基础上动 B+ 30 度
预览
点 10
在第一点基础上动 B+ 40 度
预览
点 11
在第一点基础上动 B- 20 度

预览
点 12
在第一点基础上动 B- 30 度
预览
点 13
在第一点基础上动 B- 40 度
预览
点 14
在第一点基础上动 C+ 30 度
预览
点 15
在第一点基础上动 C+ 50 度

预览
点 16
在第一点基础上动 C+ 70 度
预览
点 17
在第一点基础上动 C+ 90 度
预览
点 18
在第一点基础上动 C- 30 度
预览
点 19
在第一点基础上动 C- 60 度
预览
点 20
第二十点在第一点基础上动 C- 90 度
预览
预览
如果本文有错误请向我们反馈,我们很珍惜您的意见或建议。