标定系列_12/15点标定
2022-05-23
12 点/15 点/20 点标定公用一个标定界面,标定前 12 个点即为使用 12 点标定法。
15 点的标定需要重新进行标定,不可在 12 点的计算结果上进行标定,12 点的标定结果只有工具手的 XYZ 轴方向偏移,无绕 ABC 旋转的数值。
12 点标定与 15 点标定均有修正零点的功能
在标定计算完成后,移动机器人置第一个位置,会有偏差,原因是该标定方式具有修正零点的功能
点击“工具手标定”界面底部的【20 点标定】按钮,进入标定界面,如图。
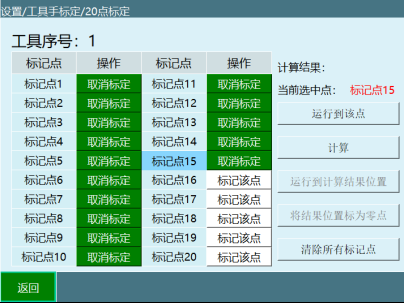
具体标定步骤如下:
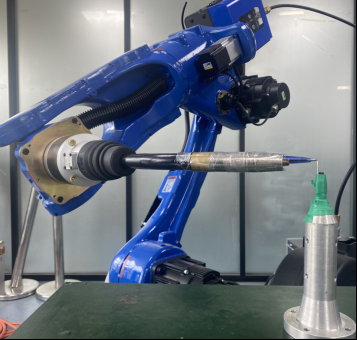
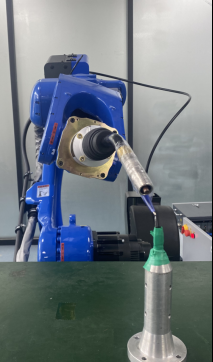
- 找到一个参考点(标定锥尖端为参考点),并确保此参考点固定。
- 开始插入位置点,每插入一点,点击【标记该点】,插入十五个点
具体步骤如下。
点 1
机器人回归零点,通过直角坐标将机器人尖端对准标定锥尖端

点 2
在第一个点的基础上,通过直角坐标系将 C 旋转 180 度;尖端对齐标定第二点

点 3
机器人回归零点,通过直角坐标系将机器人尖端对准标定锥尖端,标定第三个(与第一个点相同)

点 4
在第三个点的基础上,通过直角坐标系做 B-,度数位于 30°-60°,尖端对齐

点 5
在第四个点的基础上,通过直角坐标系做 B+,J5>-90°,将机器人尖端对准标定锥尖端,标定第五个点

点 6
选中第一个点,并将机器人移动到第一个点,在第一个点的基础上,通过直角坐标系做 B+,J5>-90°,尖端对齐标定第六个点

点 7
在第一个点的基础上,通过直角坐标系做 B-,J5>-90°,尖端对齐标定第七个点

点 8
在第七个点的基础上,通过直角坐标系做 A+,旋转 90°,J5>-90°,尖端对齐标定第八个点
点 9
在第七个点的基础上,通过直角坐标系做 A-,旋转 90°,J5>-90°,尖端对齐标定第九个点

点 10
机器人回到第一个点,通过关节坐标系点动五轴,使五轴向上,5 轴角度<-90°,将尖端对齐,标定第十个点
点 11
机器人在第十点的基础上,通过直角坐标系做 A+,旋转 90°,J5 轴角度<-90°,尖端对齐标定第十一个点

点 12
机器人在第十点的基础上,通过直角坐标系做 A-,旋转 90°,J5<-90°,尖端对齐标定第十一个点

点 13
机器人回到零点位置,调整机器人姿态,使机器人末端工具尖端竖直朝下,将标定尖端与标定锥对齐,标定第十三个点

点 14
在第十三点的基础上,通过直角坐标系做 X-,机器人位移一段距离,直接点击标定第十四点
点 15
在第十四点的基础上,通过直角坐标系做 Y+,机器人位移一段距离,直接点击标定第十五点