
运控改变世界 | 纳博特控制系统发布会成功举办
2024-01-22
自2015年成立以来,纳博特始终秉持着“创新、信任、开放”的理念,致力于为全球客户提供高效、稳定的控制系统解决方案。 深耕八载,我们见证了纳博特从立足南京到苏州、东莞研发中心成立,累计销售20000+并成功打入国际市场。八年来,纳博特不仅在产品研发上取得了丰硕的成果,也在业界树立了良好的口碑。
纳博特控制系统发布会成功举办
2024年1月19日,纳博特科技在中国苏州举行了控制系统发布会,会上,我们回顾了纳博特八年的发展历程,并展望了2024年的发展规划。



过去八年纳博特都做了什么工作?
算法方面:
- 我们建立了行业最全面的机器人算法库,涵盖了数十种机器人构型;
- 我们将运动学、动力学、插补方式接口化,用户可自行实现,完美保护商业机密;
- 动力学可以支持任意机型,支持负载辨识, 拖拽及碰撞灵敏度高,软浮动;
二次开发平台:
- 支持Python、lua等多种脚本语言,方便使用者学习和使用;
- 提供语言包模块,集成商可自行翻译成任意语言,方便拓展海外市场;
- 提供中文编程语言;
- 提供数据访问接口;
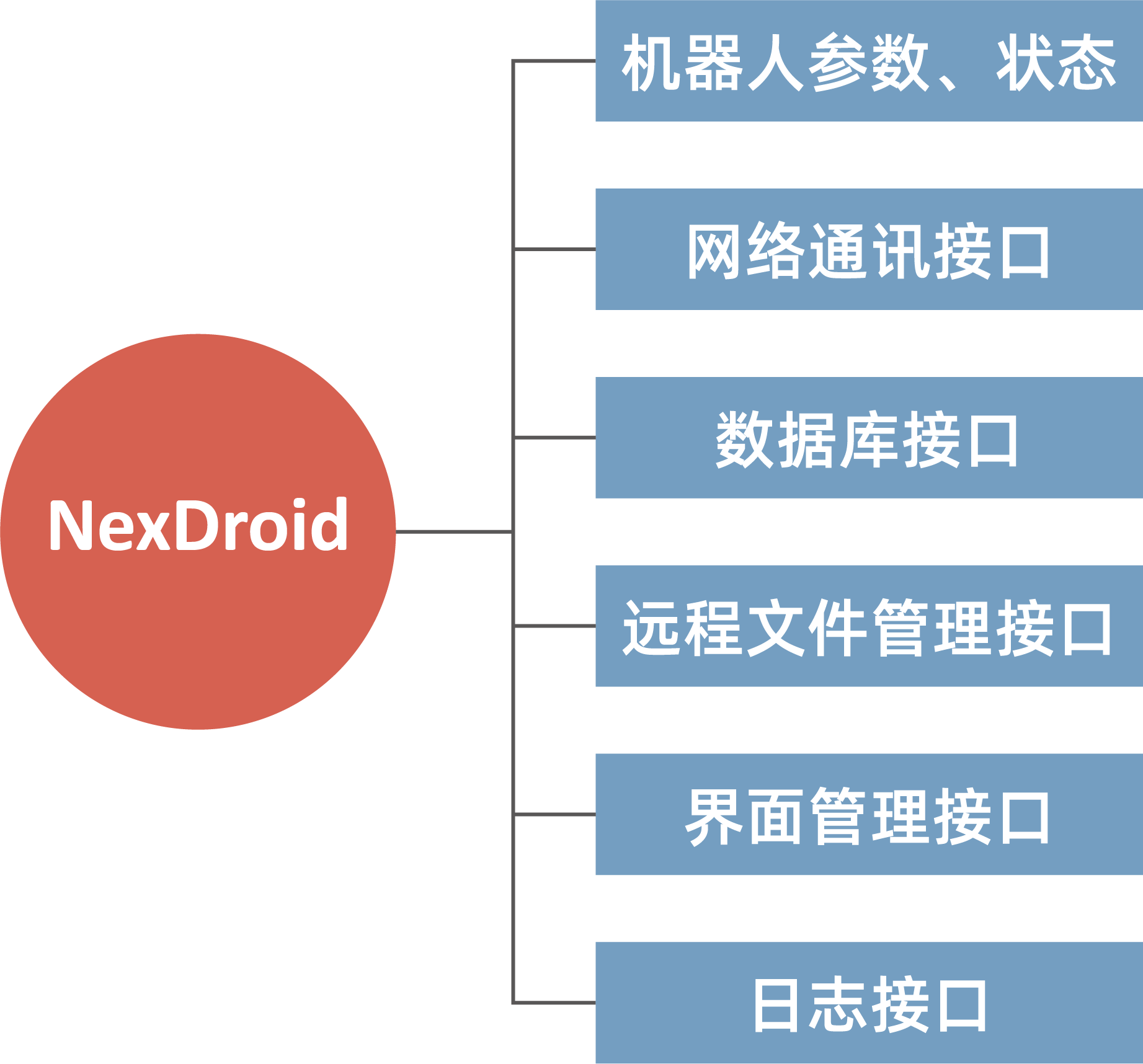
- 支持多客户端连接控制器,可进行多端操作和监控,方便远程云端监控设备状态。

工艺平台:
我们建立了弧焊、点焊、码垛、冲压、喷涂、上下料、雕刻等行业最丰富的工艺库。
通讯协议:
纳博特控制系统兼容最多的通讯协议
- 基于OPC-UA打通IT与OT系统
- EtherCAT(ETG会员单位)
- CAN/CANopen/CANApe
- Profinet/Profibus(PN会员单位)
- CCLink IE TSN(CCLink会员单位)
- FINS(欧姆龙)
- EtherNet/IP
- LIN
- AutoSAR(车联网)
纳博特的产品思路:聚焦、节制
进军通用运动控制市场
除了机器人市场,通用运动控制市场潜力巨大。 我们为机器人而生,但不会止步于此。 通用运动控制领域才是我们的星辰大海。
建设开源社区
我们会在Github、Gitee等开源社区建设纳博特开源库,拥抱开源。
定期举办全国培训活动
我们将在全国范围巡回开展培训活动,让用户了解纳博特控制系统,爱上纳博特控制系统。
提高质量,靠品质征服用户
我们将提高软件质量,保证交付产品0重大Bug。 同时我们将会对所有硬件产品进行CE等硬件测试,保证产品的硬件稳定性。 2024年开始我们将开始进行功能安全认证 IEC61508。
建设强大的运控研发团队
我们将会把团队规模从120人扩容到200人,同时技术人员占比不小于80%。
运控算法优化
我们将继续对标倍福(Beckhoff)、KEBA等国际顶级控制系统,在运控算法方面继续优化。
视控一体技术
2D/3D/激光技术与机器人的结合,让机器人具备感知能力。
驱控一体技术
驱控一体是高性能必然之路,驱动技术门槛将会大幅降低。
移动及复合机器人
纳博特将自主研发复合机器人的导航、调度、运动控制算法。
IDE平台建设
纳博特NexDroid Studio IDE平台将包括设备管理、编程、仿真功能,并集成Copilot提供AI生成程序的能力。
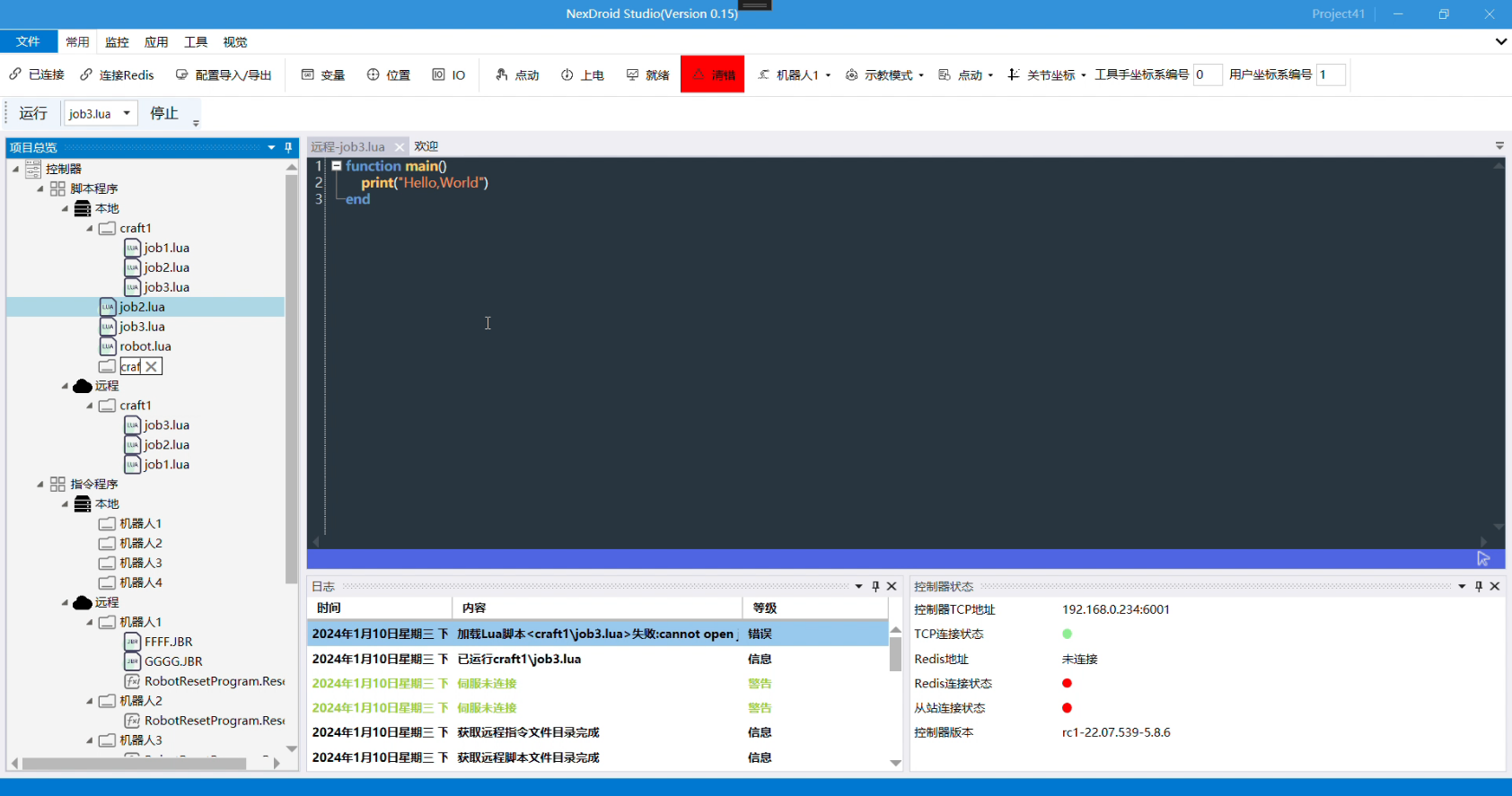
NexDroid Studio包含机器人管理工具、编程环境、调试工具、二次开发平台、工业互联网平台。 提供本地、远程作业程序文件管理,集成了Lua、JBR等语言服务器能够提供高效的语法、词法解析、代码补全高亮等功能。同时集成了Copilot提供基于AI的代码生成服务。 为了方便调试人员的使用,NexDroid Studio集成了示波器、命令行、远程文件管理、ENI编辑、虚拟仿真等调试工具。
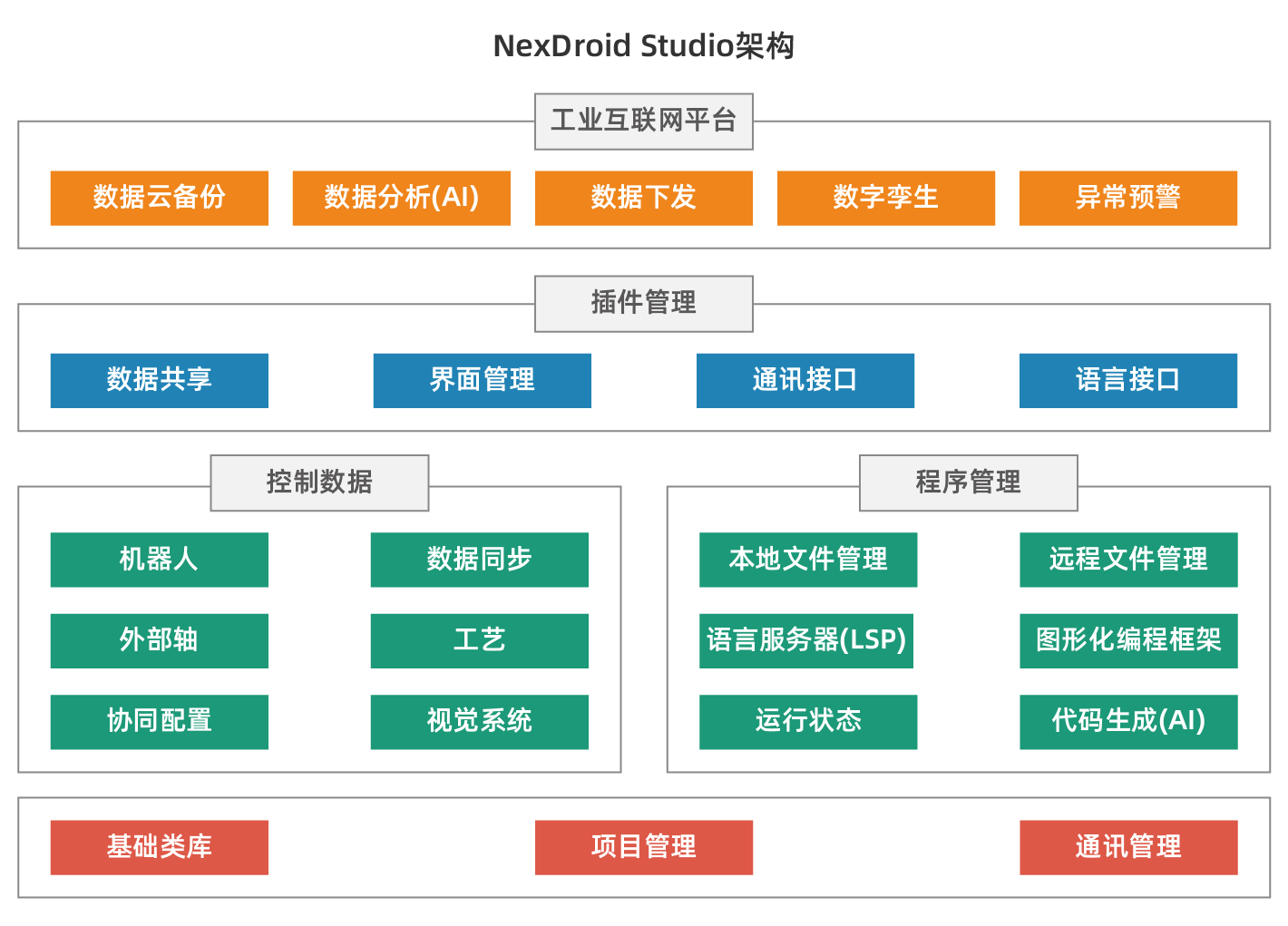
工业互联网平台
纳博特工业互联网平台提供工业数据管理、AI训练、预测性维护、生产工艺改善等能力。 NexDroid Studio工业互联网平台可以将本地控制数据与运行程序云备份,并下发到联网控制器。数字孪生系统能够真实还原物理设备的运行状态,利用强大的云服务器,开发人员可以自行添加算子对云端数据进行分析,并利用分析结果对异常状况进行预警。
NexDroid 2.0
NexDroid2.0的目标领域是机器人和通用运动控制市场。它包含了新硬件、新算法、IDE平台、视控一体技术和AI能力。
算法优化
优化的插补,平滑过渡和小线段算法
- 增加平滑过渡类型:按时间过渡,按距离过渡;
- 采用新的平滑算法,保证曲线G3连续;
- 在平滑过渡的基础上建立包括轨迹误差约束,速度约束,加速度约束,加加速度在内的约束模型,在约束模型内进行小线段轨迹前瞻,提高运行效率。
奇异点慢速规避通过
- 数学表现:机械臂的奇异位姿意味着Jacobian矩阵不再满秩 ;
- 算法表现:存在无穷多解,试图令关节4和6瞬时旋转大角度 ;
- 解决方案:提前检测奇异点位置,限制关节转速,慢速通过奇异点相关区域
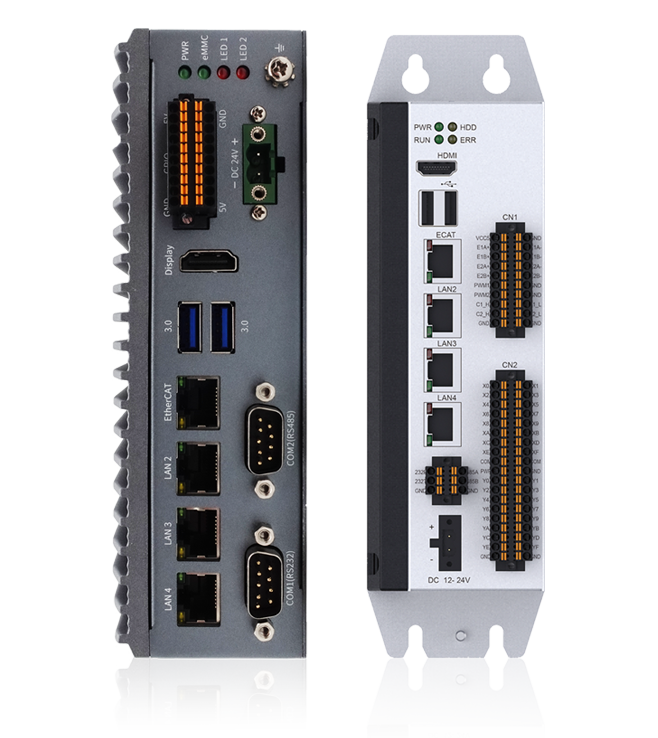
控制器硬件提升
NexDroid 2.0搭配新款控制器C1200和C1201。 CPU从J1900更换到J6412,整体运算性能提升3倍,由原来的24轴,实现到64轴同运动。 多网口的设计使工业现场的布线更加简洁,将相机/PLC等所种设备的接口统一,替换原有的工业交换机方案。 搭载超级电容UPS模块/有效的解决了工业场景因非法断电造成的硬件损害和数据丢失难题。并提供了数据恢复功能,可恢复断电之前的运行逻辑,保证现场的持续生产。 C1201更是搭配了丰富的外围接口,以X86+FPGA结构方式,保证了IO输出的高速性。此外PWM/CAN接口的配置,让C1201可以应用于激光焊接/切割等更复杂的工艺场景。
驱控一体柜2.0
提供EtherNet、RS485/232、EXTENC等多种接口,同时自带IO模块拥有16路输出、24路输入,方便客自定义。 单轴额定电流可达9A,小身材拥有大能量,最大能带动1.5kW电机,同时支持多种主流品牌电机。 模块化设计,易维护,易升级,易拓展。 体积优化:较上一代驱控柜缩小21%,整机重量仅为7Kg。 板卡连接,机柜内部线缆数量由30根降低为10根,提升稳定性。 1根网线,即可完成机器人和伺服的调试,提升效率。

星辰一号协作控制柜
- 自带48V电源输出(1500W功率)
- 符合安规标准
- 标准航空插头
- 支持EtherCAT扩展轴
- 支持TCP/IP
- IP65 防水溅

工艺改进
完美多层多道焊
可支持轨迹自定义偏移,缩进,推角,倾角等,支持自适应跟踪。
一拖多焊接
最多同时可连接四台焊机。
飞拍工艺
- 眼在手上:相机安装在工具手上,飞拍定位;
- 眼在手外:相机固定在被测物体运动路径上,可高速飞行定位;
- 位置精度在0.2mm以内。
传送带跟踪工艺
- 采用动态跟踪同步算法:动态同步,适合高速、高精度的同步场景;
- 一机多带:一个机器人智能处理多条线,提高效率;
- 多机协同:多机协同高速动态分拣;主要应用于食品、医药等行业的快速分拣、包装,效率更高;
- 多工具切换:跟随中,可任意切换工具手,同时抓取多个目标。
视控一体技术
将视觉软件融入控制系统。